Mejor que de nuestro juicio, debemos fiarnos del cálculo algebraico
Leonhard Euler
En un artículo anterior habíamos hablado sobre la ecuación lineal de primer grado con dos incógnitas y sobre la recta en el plano afín.
Esas ideas se pueden extender al espacio en tres dimensiones. Así que vamos allá.
Ya sabemos que una ecuación lineal es una ecuación polinómica de grado uno con una o varias incógnitas.
Si la ecuación tiene tres incógnitas la ecuación adopta la forma
$$ax+by+cz+d=0$$
donde \(a\), \(b\), \(c\) y \(d\) son números reales, y las incógnitas son \(x\), \(y\), \(z\). Llamando, por ejemplo, \(x=\lambda\), \(y=\mu\), podemos despejar la incógnita \(z\):
$$ax + by + cz + d = 0 \Rightarrow cz =-a\lambda-b\mu-d\Rightarrow z =-\frac{a}{c}\lambda-\frac{b}{c}\mu-\frac{d}{c}$$
El hecho de llamar \(\lambda\) a la incógnita \(x\) y \(\mu\) a la incógnita \(y\), viene a decir que las incógnitas \(x\) e \(y\) pueden tomar cualquier valor real, a los que llamaremos parámetros. Por tanto, la incógnita \(z\) depende del valor que le demos a los parámetros \(\lambda\) y \(\mu\).
Podemos escribir las soluciones en forma de terna ordenada, de la siguiente manera:
$$\left( {x,y,z} \right) = \left( {\lambda\, ,\mu\, ,-\frac{a}{c}\lambda-\frac{b}{c}\mu-\frac{d}{c}} \right)$$
Por ejemplo, sea la ecuación lineal de primer grado con tres incógnitas \(x-2y+3z-5=0\). En este caso \(a=1\), \(b=-2\), \(c=3\) y \(d=-5\). Por tanto, las soluciones son de la forma
$$\left( {x,y,z} \right) = \left( {\lambda\, ,\mu\, ,-\frac{1}{3}\lambda-\frac{{-2}}{3}\mu-\frac{{-5}}{3}} \right) = \left( {\lambda\, ,\mu\, ,-\frac{1}{3}\lambda + \frac{2}{3}\mu + \frac{5}{3}} \right)$$
Ahora, si damos valores a \(\lambda\) y a \(\mu\) podemos ir obteniendo los valores de \(z\). Por ejemplo, si \(\lambda=5\) y \(\mu=0\), entonces
$$z = -\frac{1}{3}\lambda + \frac{2}{3}\mu + \frac{5}{3} = -\frac{1}{3} \cdot 5 + \frac{2}{3} \cdot 0 + \frac{5}{3} = -\frac{5}{3} + \frac{5}{3} = 0$$
Procediendo de manera similar podemos obtener las ternas de soluciones siguientes:
$$\lambda=0\ ,\ \mu=0\Rightarrow \left( {x,y,z} \right) = \left( {0,0,\frac{5}{3}} \right)$$
$$\lambda=0\ ,\ \mu=-\frac{5}{2}\Rightarrow \left( {x,y,z} \right) = \left( {0,-\frac{5}{2},0} \right)$$
$$\lambda=2\ ,\ \mu=2\Rightarrow \left( {x,y,z} \right) = \left( {2,2,\frac{7}{3}} \right)$$
$$\lambda=-3\ ,\ \mu=-1\Rightarrow \left( {x,y,z} \right) = \left( {-3,-1,-2} \right)$$
Podemos representar incluso los valores anteriores usando unos ejes de coordenadas, es decir, fijando un sistema de referencia afín tridimensional (el espacio afín). Este sistema es el habitual, es decir, \(R = \left\{ {O,\,\,\left\{ {{\rm{i}},{\rm{j}},{\rm{k}}} \right\}} \right\}\), donde \({\rm{i}} = \left( {1,0,0} \right)\), \({\rm{j}} = \left( {0,1,0} \right)\), \({\rm{k}} = \left( {0,0,1} \right)\) (ya se habló sobre este sistema de referencia en un artículo anterior, dedicado a los sistemas de dos ecuaciones lineales de primer grado con dos incógnitas). Pues bien, todas las ternas que son soluciones de la ecuación \(x-2y+3z-5=0\) están situadas en un mismo plano \(\pi\), con lo que llamaremos
$$\pi\equiv x-2y+3z-5=0$$
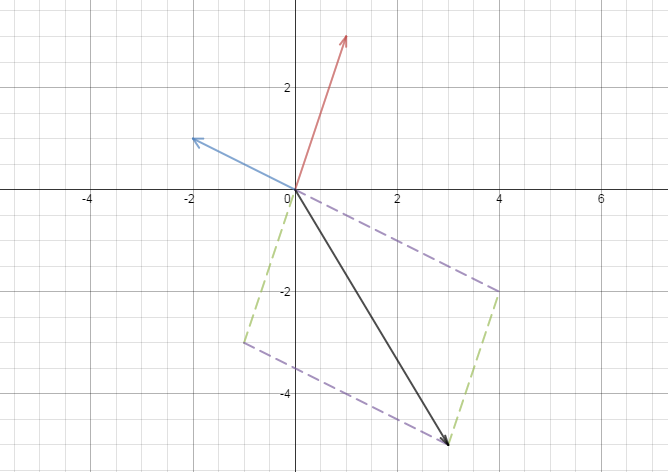
Lo podemos apreciar en la figura siguiente, en la que incluso se observa el punto del plano \(\left( { – 3, – 1,2} \right)\), que también representa al vector de las mismas coordenadas.
Las soluciones de una ecuación lineal de primer grado con tres incógnitas, \(ax + by + cz + d = 0\), también las podemos escribir así:
$$\left( {x,y,z} \right) = \left( {\lambda\, ,\mu\, , -\frac{a}{c}\lambda-\frac{b}{c}\mu-\frac{d}{c}} \right) = \left( {\lambda ,0,-\frac{a}{c}\lambda } \right) + \left( {0,\mu ,-\frac{b}{c}\mu } \right) + \left( {0,0,-\frac{d}{c}} \right) \Rightarrow$$
$$\Rightarrow \left( {x,y,z} \right) = \lambda \left( {1,0,-\frac{a}{c}} \right) + \mu \left( {0,1,-\frac{b}{c}} \right) + \left( {0,0,-\frac{d}{c}} \right)$$
Siguiendo con el ejemplo anterior podemos escribir las soluciones de la ecuación $x-2y+3z-5=0$ del siguiente modo:
$$\left( {x,y,z} \right) = \lambda \left( {1,0,-\frac{1}{3}} \right) + \mu \left( {0,1,\frac{2}{3}} \right) + \left( {0,0,\frac{5}{3}} \right)$$
Geométricamente, la expresión anterior indica que el plano \(\pi\equiv x-2y+3z-5=0\) es el plano paralelo al plano que contiene a los vectores \(\left( {1,0,-\dfrac{1}{3}} \right)\), \(\left( {0,1,\dfrac{2}{3}} \right)\) y que pasa por el punto \(\left( {0,0,\dfrac{5}{3}} \right)\). Dicho de otro modo: todos los puntos de este plano son los extremos de los vectores que se obtienen al sumar cualquier vector proporcional al vector \(\left( {1,0,-\dfrac{1}{3}} \right)\) con cualquier vector proporcional al vector \(\left( {0,1,\dfrac{2}{3}} \right)\), y con el vector \(\left( {0,0,\dfrac{5}{3}} \right)\).
De hecho, si tomamos \(\lambda=1\) y \(\mu=1\), tenemos que un punto del plano es
$$\left( {x,y,z} \right) = 1\left( {1,0,-\frac{1}{3}} \right) + 1\left( {0,1,\frac{2}{3}} \right) + \left( {0,0,\frac{5}{3}} \right) = \left( {1,1,2} \right)$$
No es fácil imaginar esta situación en el espacio, pero con ayuda de alguna aplicación que represente figuras en tres dimensiones podemos hacernos una idea. En este caso, como en la imagen anterior, hemos utilizado Geogebra.
En la siguiente figura se observa como nuestro plano \(\pi \equiv x – 2y + 3z – 5 = 0\), es paralelo al plano que contiene a \(\left( {1,0, – \dfrac{1}{3}} \right)\) y a \(\left( {0,1,\dfrac{2}{3}} \right)\) y además pasa por el punto \(\left( {0,0,\dfrac{5}{3}} \right)\).
Se puede apreciar con claridad que el punto \(\left( {1,1,2} \right)\), generado por las soluciones correspondientes a \(\lambda=1\) y \(\mu=1\), pertenece al plano \(\pi\).
Analizando lo anterior llegamos a una conclusión: un plano viene completamente determinado por dos vectores con distinta dirección (linealmente independientes) y un punto. O lo que es lo mismo, existe un único plano que pasa por un punto dado y en dos direcciones determinadas. A los vectores que determinan el plano se le llaman vectores de dirección o vectores directores del plano.
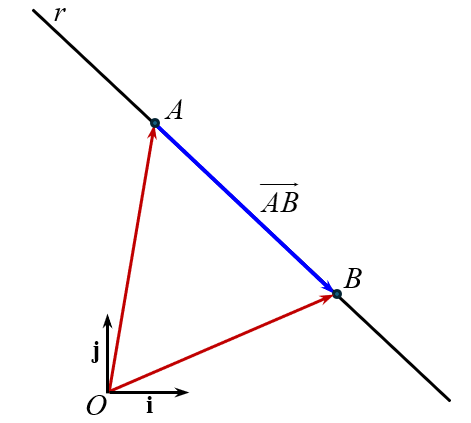
Generalicemos esta situación desde el punto de vista vectorial. Para ello llamaremos \(O\) al origen de coordenadas, \(A\) a un punto cualquiera del espacio, \(\overrightarrow {OA} \) al vector de posición con origen en \(O\) y extremo en \(A\), y \(\vec u\) y \(\vec v\) a dos vectores con distinta dirección. La ecuación del plano que pasa por el punto \(A\) con la dirección de los vectores \(\vec u\) y \(\vec v\) viene dada por
$$\overrightarrow {OX} = \overrightarrow {OA} \, + \lambda \vec u + \mu \vec v\,,\,\,\lambda ,\mu \in \mathbb{R}$$
donde \(\overrightarrow {OX} \) es el vector de posición con origen en \(O\) generado al dar valores a los parámetros \(\lambda\) y \(\mu\).
Hemos de insistir en que las coordenadas de los vectores están escritas en base al sistema de referencia \(R = \left\{ {O,\,\,\left\{ {{\rm{i}},{\rm{j}},{\rm{k}}} \right\}} \right\}\) del que hemos hablado anteriormente. Es decir, hemos instalado en el espacio unos ejes de coordenadas: el eje \(X\) para la anchura, el eje \(Y\) para la profundidad, y el eje \(Z\) para la altura. Así, cuando hablamos de tomar el vector \(\vec e = \left( {1,1,2} \right)\) , y lo visualizamos en el espacio como un segmento orientado desde el origen de coordenadas \(O = \left( {0,0,0} \right)\) hasta el extremo en el punto de coordenadas \(\left( {1,1,2} \right)\), lo que estamos haciendo realmente es la siguiente operación:
$$\left( {1,1,2} \right) = 1\left( {1,0,0} \right) + 1\left( {0,1,0} \right) + 2\left( {0,0,1} \right) = 1 \cdot {\rm{i}} + 1 \cdot {\rm{j}} + 2 \cdot {\rm{k}}$$
O lo que es lo mismo, el vector \(\vec e = \left( {1,1,2} \right)\) es aquel que tiene una unidad de anchura, otra de profundad y dos unidades de altura.
Los vectores \({\rm{i}} = \left( {1,0,0} \right)\), \({\rm{j}} = \left( {0,1,0} \right)\), \({\rm{k}} = \left( {0,0,1} \right)\) situados sobre el eje \(X\), sobre el eje \(Y\) y sobre el eje \(Z\), tienen módulo \(1\) y son perpendiculares. Se dice que los tres vectores son ortonormales o que forman una base ortonormal del espacio. Además cualquier vector \(\left( {a,b,c} \right)\) lo podemos escribir así:
$$\left( {a,b,c} \right) = a\left( {1,0,0} \right) + b\left( {0,1,0} \right) + c\left( {0,0,1} \right) = a \cdot {\rm{i}} + b \cdot {\rm{j}} + c \cdot {\rm{k}}$$
La igualdad anterior expresa que todo vector del espacio, o lo que es lo mismo, todo el espacio, se puede generar a partir de los vectores \({\rm{i}} = \left( {1,0,0} \right)\), \({\rm{j}} = \left( {0,1,0} \right)\), \({\rm{k}} = \left( {0,0,1} \right)\). Se dice que todo vector del espacio es una combinación lineal de \({\rm{i}} = \left( {1,0,0} \right)\), \({\rm{j}} = \left( {0,1,0} \right)\), \({\rm{k}} = \left( {0,0,1} \right)\). Estos vectores, junto con el origen de coordenadas \(O\) forman el sistema de referencia ortonormal \(R = \left\{ {O,\,\,\left\{ {{\rm{i}},{\rm{j}},{\rm{k}}} \right\}} \right\}\).
La geometría en el espacio afín empieza de este modo. Se considera un sistema de referencia afín ortonormal \(R = \left\{ {O,\,\,\left\{ {{\rm{i}},{\rm{j}},{\rm{k}}} \right\}} \right\}\). Se sabe que todo vector que se apoye en \(O\) se puede poner como combinación lineal de \({\rm{i}}\), de \({\rm{j}}\) y de \({\rm{k}}\):
$$X = \overrightarrow {OX} = {x_1}{\rm{i}} + {x_2}{\rm{j}} + {x_3}{\rm{k}} = \left( {{x_1},{x_2},{x_3}} \right)$$
Por tanto, un vector cualquiera del espacio lo podemos «atrapar» en nuestro sistema de referencia. Todo vector \(\vec e\) del espacio tiene un origen \(A\left( {{a_1},{a_2},{a_3}} \right)\) y un extremo \(B\left( {{b_1},{b_2},{b_3}} \right)\), y por tanto \(\vec e = \overrightarrow {AB}\). Además:
$$\overrightarrow {OB} = \overrightarrow {OA} + \overrightarrow {AB} \Rightarrow \overrightarrow {AB} = \overrightarrow {OB}-\overrightarrow {OA} \Rightarrow$$
$$\Rightarrow \overrightarrow {AB} = \left( {{b_1},{b_2},{b_3}} \right)-\left( {{a_1},{a_2},{a_3}} \right) \Rightarrow \overrightarrow {AB} = \left( {{b_1}-{a_1},{b_2}-{a_2},{b_3}-{a_3}} \right)$$
Por ejemplo, el vector \(\vec e\) que une el punto \(P\left( {3,-1,2} \right)\) con el punto \(Q\left( {2,-\,3,-1} \right)\) es
$$\vec e = \overrightarrow {PQ} = \left( {2-3,-3-\left( {-1} \right),-1-2} \right) = \left( {-1,-2,-3} \right)$$
Nuestro vector \(\vec e\) acaba de ser escrito en base a nuestro sistema de referencia. Hay infinitos vectores en el espacio con el mismo módulo, dirección y sentido, pero sólo uno que se apoya en el origen \(O\) de nuestro sistema de referencia. Al conjunto de todos los vectores con el mismo módulo, dirección y sentido se le llama vector libre del espacio.
Con las consideraciones anteriores la ecuación vectorial del plano que pasa por el punto \(A\) con la dirección de los vectores \(\vec u\) y \(\vec v\), \(\overrightarrow {OX} = \overrightarrow {OA} \, + \lambda \vec u + \mu \vec v\,,\,\,\lambda ,\,\,\mu \in \mathbb{R}\), adquiere todo su sentido.
Si la ecuación vectorial la expresamos en coordenadas tenemos:
$$\left( {x,y,z} \right) = \left( {{a_1},{a_2},{a_3}} \right) + \lambda \left( {{u_1},{u_2},{u_3}} \right) + \mu \left( {{v_1},{v_2},{v_3}} \right) \Rightarrow$$
$$\Rightarrow \left( {x,y,z} \right) = \left( {{a_1} + \lambda {u_1} + \mu {v_1},{a_2} + \lambda {u_2} + \mu {v_2},{a_3} + \lambda {u_3} + \mu {v_3}} \right)$$
Igualando coordenadas:
$$\left\{ \begin{array}{l} x = {a_1} + \lambda {u_1} + \mu {v_1}\\ y = {a_2} + \lambda {u_2} + \mu {v_2}\\ z = {a_3} + \lambda {u_3} + \mu {v_3} \end{array} \right.$$
Las ecuaciones anteriores reciben el nombre de ecuaciones paramétricas del plano. Estas ecuaciones las podemos ver como un sistema de tres ecuaciones con dos incógnitas: \(\lambda\) y \(\mu\).
$$\left\{ \begin{array}{l} \lambda {u_1} + \mu {v_1} = x-{a_1}\\ \lambda {u_2} + \mu {v_2} = y-{a_2}\\ \lambda {u_3} + \mu {v_3} = z-{a_3} \end{array} \right.$$
Si de este sistema eliminamos los parámetros \(\lambda\) y \(\mu\) obtenemos la ecuación general o implícita del plano, que será una ecuación lineal de primer grado con tres incógnitas:
$$Ax+By+Cz+D=0$$
Veamos con un ejemplo cómo eliminar los parámetros. Supongamos que queremos hallar la ecuación general del plano que pasa por el punto \(A\left( {2,3,5} \right)\) y es paralelo a los vectores \(\vec u = \left( { – 1, – 2, – 3} \right)\), \(\vec v = \left( {1,3,5} \right)\). Sus ecuaciones paramétricas serán:
$$\left\{ \begin{array}{l} x = 2-\lambda+\mu \\ y = 3-2\lambda+3\mu \\ z = 5-3\lambda + 5\mu \end{array} \right.$$
Y de aquí:
$$\left\{ \begin{array}{l}-\lambda+\mu = x-2\\ -2\lambda+3\mu = y-3\\ -3\lambda + 5\mu = z-5 \end{array} \right.$$
Consideremos que las incógnitas son \(\lambda\) y \(\mu\) y apliquemos el método de Gauss para resolver el sistema:
$$\left( {\begin{array}{*{20}{c}} {-1}&1&{x-2}\\{-2}&3&{y-3}\\{-3}&5&{z-5}\end{array}} \right)\longrightarrow\left( {\begin{array}{*{20}{c}}{-1}&1&{x-2}\\ 0&1&{y-2x+1}\\0&2&{z-3x + 1}\end{array}} \right)\longrightarrow\left( {\begin{array}{*{20}{c}}{-1}&1&{x-2}\\0&1&{y-2x + 1}\\0&0&{x-2y + z-1}\end{array}} \right)$$
De lo anterior se deduce, para que el sistema tenga soluciones (precisamente las soluciones son todos los puntos del plano), que \(x-2y + z-1 = 0\), justamente la ecuación general o implícita del plano.
Sin hacer el último paso en el método de Gauss también se obtiene lo mismo. Las dos últimas ecuaciones asociadas son
$$\left\{ \begin{array}{l}\mu = y-2x + 1\\2\mu = z-3x + 1\end{array} \right.$$
y de aquí se obtiene, por igualación, que
$$y-2x + 1 = \frac{{z-3x + 1}}{2} \Rightarrow 2y-4x+2=z-3x+1 \Rightarrow x-2y+z-1=0$$
Puedes ver y descargar el artículo en formato pdf aquí.