

Nada hay tan práctico como una buena teoría
Una ecuación lineal es una ecuación polinómica de grado uno con una o varias incógnitas. Si la ecuación solamente tiene una incógnita la ecuación es de la forma
$$ax+b=0$$
donde \(a\) y \(b\) son números reales con \(a\neq0\), y \(x\) es la incógnita.
Como \(a\neq0\), \(a\) tiene inverso, con lo que podemos despejar la incógnita con facilidad:
$$ax + b = 0\, \Rightarrow {a^{ – 1}} \cdot \left( {ax + b} \right) = {a^{ – 1}} \cdot 0 \Rightarrow {a^{ – 1}}ax + {a^{ – 1}}b = 0 \Rightarrow$$
$$\Rightarrow x + {a^{ – 1}}b = 0 \Rightarrow x = – {a^{ – 1}}b$$
Así por ejemplo, la solución de \(3x+4=0\) es \(x = – {3^{ – 1}} \cdot 4 = – \dfrac{1}{3} \cdot 4 = – \dfrac{4}{3}\).
Si la ecuación tiene dos incógnitas la ecuación adopta la forma
$$ax+by+c=0$$
donde \(a\), \(b\) y \(c\) son números reales con \(a\neq0\) y \(b\neq0\), y las incógnitas son \(x\) e \(y\). Llamando por ejemplo \(x=\lambda\), podemos despejar la incógnita \(y\).
$$ax + by + c = 0 \Rightarrow by = -a\lambda-c \Rightarrow y=-\frac{a}{b}\lambda-\frac{c}{b}$$
El hecho de llamar \(\lambda\) a la incógnita \(x\) viene a decir que la incógnita \(x\) puede tomar cualquier valor real, al que llamaremos parámetro. Por tanto, la incógnita \(y\) depende del valor que le demos al parámetro \(\lambda\).
Podemos escribir las soluciones para \(x\) y para \(y\) en forma de par ordenado, de la siguiente manera:
$$\left( {x,y} \right) = \left( {\lambda,\, -\frac{a}{b}\lambda-\frac{c}{b}} \right)$$
Veamos un ejemplo. Sea la ecuación lineal de primer grado con dos incógnitas dada por \(2x-y+3=0\). En este caso \(a=2\), \(b=-1\) y \(c=3\). Por tanto las soluciones son de la forma:
$$\left( {x,y} \right) = \left( {\lambda,\,-\frac{2}{{ – 1}}\lambda-\frac{3}{{ – 1}}} \right) = \left( {\lambda,\,2\lambda + 3} \right)$$
Ahora, si damos valores a \(\lambda\) podemos hacer una tabla de valores:
$$\begin{array}{|c|c|c|c|c|c|c|c|c|c|}\hline x & \lambda & -5 & -4 & -3 & -2 & -1 & 0 & 1 & 2 \\ \hline y & 2\lambda+3 & -7 & -5 & -3 & -1 & 1 & 3 & 5 & 7\\ \hline\end{array}$$
Incluso podemos representar los valores anteriores usando unos ejes de coordenadas.

No es difícil darse cuenta de que podemos colocar infinitos puntos y que todos ellos formarán una recta. Por eso, a la expresión de una ecuación lineal de primer grado con dos incógnitas, también se la conoce como ecuación general de una recta.
Además, ya sabíamos que, si de la ecuación \(ax+by+c=0\), despejamos la incógnita \(y\) tenemos otra ecuación con la forma \(y=mx+n\), llamada ecuación afín de la recta. En nuestro ejemplo la ecuación afín de la recta es \(y=2x+3\). Y en esta ecuación es donde podemos con facilidad realizar también la tabla de valores anterior con el objetivo de representar gráficamente la recta dada.
Con algo de conocimiento de geometría en el plano afín podemos hacer más cosas con la ecuación lineal de primer grado con dos incógnitas. Ya hemos visto que las soluciones las podemos escribir en forma de par ordenado:
$$\left( {x,y} \right) = \left( {\lambda,\, -\frac{a}{b}\lambda-\frac{c}{b}} \right)$$
Recordemos que, dados dos pares ordenados \(\left( {a,b} \right)\), \(\left( {c,d} \right)\), y un número real \(\lambda\), la suma de pares ordenados y el producto de un número real por un par ordenado, están definidos del siguiente modo:
$$\left( {a,b} \right) + \left( {c,d} \right) = \left( {a + c,b + d} \right)\quad\text{;}\quad\lambda \left( {a,b} \right) = \left( {\lambda a,\lambda b} \right)$$
Si se establecen unos ejes cartesianos sobre un plano, un par ordenado \(\left( {a,b} \right)\) tiene una visualización gráfica: un punto en el plano. O también: el par ordenado lo podemos ver como un vector con origen en el punto \(\left( {0,0} \right)\) (origen de coordenadas) y extremo el punto \(\left( {a,b} \right)\).
Con las ideas anteriores, las soluciones de una ecuación lineal de primer grado con dos incógnitas, \(ax+by+c=0\), las podemos escribir así:
$$\left( {x,y} \right) = \left( {\lambda , -\frac{a}{b}\lambda-\frac{c}{b}} \right) = \left( {\lambda , -\frac{a}{b}\lambda } \right) + \left( {0, -\frac{c}{b}} \right) = \lambda \left( {1, -\frac{a}{b}} \right) + \left( {0, -\frac{c}{b}} \right)$$
Siguiendo con el ejemplo visto anteriormente podemos escribir las soluciones de la ecuación \(2x-y+3=0\) del siguiente modo ($a=2$, $b=-1$, $c=-3$):
$$\left( {x,y} \right) = \lambda \left( {1,2} \right) + \left( {0,3} \right)$$
La interpretación geométrica de la expresión anterior es la siguiente: la recta \(2x-y+3=0\) es la recta paralela al vector \(\left( {1,2} \right)\) que pasa por el punto \(\left( {0,3} \right)\). Dicho de otro modo: todos los puntos de esta recta son los extremos de los vectores que se obtienen al sumar cualquier vector proporcional al vector \(\left( {1,2} \right)\) con el vector \(\left( {0,3} \right)\).
Por ejemplo, si \(\lambda=1\), entonces \(\left( {x,y} \right) = – 1\left( {1,2} \right) + \left( {0,3} \right) = \left( { – 1, – 2} \right) + \left( {0,3} \right) = \left( { – 1,1} \right)\). Véase la figura siguiente:

Analizando todo lo anterior llegamos a una conclusión: una recta viene completamente determinada por un vector y un punto. O lo que es lo mismo, existe una única recta que pasa por un punto dado y en una dirección determinada. Al vector que determina la recta se le llama vector de dirección o vector director de la recta.
Generalicemos esta situación desde el punto de vista vectorial. Para ello llamaremos \(O\), al origen de coordenadas, \(A\) a un punto cualquiera del plano, \(\overrightarrow {OA}\) al vector de posición con origen en \(O\) y extremo en \(A\) y \(\vec e\) a un vector. La ecuación de la recta que pasa por el punto \(A\) con la dirección del vector \(\vec e\) viene dada por
$$\overrightarrow {OX} = \overrightarrow {OA} \, + \lambda \vec e\,,\,\,\lambda \in \mathbb{R}$$
donde \(\overrightarrow {OX}\) es el vector de posición con origen en \(O\) generado al dar un determinado valor al parámetro \(\lambda\).
Naturalmente, las coordenadas de los vectores están escritas en base a un sistema de referencia pues, en caso contrario, no podríamos trabajar con éstas. Habitualmente, y tal y como hemos hecho en el ejemplo anterior, esto es algo a lo que estamos acostumbrados cuando instalamos en el plano unos ejes cartesianos (el eje de abscisas y el eje de ordenadas). Pero es conveniente poner énfasis en esto. Cuando hablamos de tomar, por ejemplo, el vector \(\vec e = \left( { – 2,3} \right)\), y lo visualizamos en el plano como un segmento orientado desde el origen de coordenadas \(O = \left( {0,0} \right)\) hasta el extremo en el punto de coordenadas \(\left( { – 2,3} \right)\), lo que estamos haciendo realmente es la siguiente operación:
$$\left( { – 2,3} \right) = – 2\left( {1,0} \right) + 3\left( {0,1} \right)$$
Si ahora visualizamos los vectores \(\left( {1,0} \right)\) y \(\left( {0,1} \right)\) nos daremos cuenta rápidamente de que el primero está sobre el eje \(X\), el segundo sobre el eje \(Y\) y ambos tienen longitud o módulo \(1\). Además son claramente perpendiculares. En este caso se dice que la pareja de vectores son ortonormales o que forman una base ortonormal del plano.
Pero es que cualquier vector \(\left( {a,b} \right)\) lo podemos escribir así:
$$\left( {a,b} \right) = a\left( {1,0} \right) + b\left( {0,1} \right)$$
La igualdad anterior expresa que todo vector del plano, o lo que es lo mismo, todo el plano, se puede generar a partir de los vectores \(\left( {1,0} \right)\) y \(\left( {0,1} \right)\). A veces se dice que todo vector del plano es una combinación lineal de \(\left( {1,0} \right)\) y \(\left( {0,1} \right)\). Estos dos vectores, junto con el origen de coordenadas \(O\), forman lo que se conoce como sistema de referencia afín. Además, si los dos vectores del sistema son ortonormales hablaremos de un sistema de referencia ortonormal. Suele nombrarse a los dos vectores del sistema así: $\textbf{i} = \left( {1\,\,0} \right)$, $\textbf{j} = \left( {0\,\,1} \right)$.
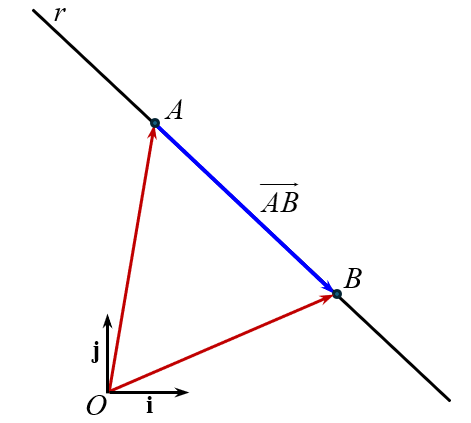
En realidad, la geometría en el plano afín empieza por aquí. Se considera un sistema de referencia afín ortonormal $R = \left\{ O,\,\left\{ \textbf{i},\,\textbf{j} \right\} \right\}$. Se sabe que todo vector que se apoye en \(O\) se puede poner como combinación lineal de \(\textbf{i}\) y de \(\textbf{j}\): \(X = \overrightarrow {OX} = {x_1}\textbf{i} + {x_2}\textbf{j} = \left( x_1,x_2 \right)\). Por tanto, un vector cualquiera del plano lo podemos «atrapar» en nuestro sistema de referencia. ¿Cómo? Es sencillo. Todo vector \(\vec e\) del plano tiene un origen \(A\left( {{a_1},{a_2}} \right)\) y un extremo \(B\left( {{b_1},{b_2}} \right)\) y, por tanto, \(\vec e = \overrightarrow {AB} \). Pero además es que (ver figura de más abajo):
$$\overrightarrow {OB} = \overrightarrow {OA} + \overrightarrow {AB} \Rightarrow \overrightarrow {AB} = \overrightarrow {OB}-\overrightarrow {OA} \Rightarrow$$
$$\Rightarrow \overrightarrow {AB} = \left( {{b_1},{b_2}} \right)-\left( {{a_1},{a_2}} \right) \Rightarrow \overrightarrow {AB} = \left( {{b_1}-{a_1},{b_2}-{a_2}} \right)$$
Por ejemplo, el vector \(\vec e\) que une el punto \(P\left( { – 2\,,\,1} \right)\) con el punto \(Q\left( { 1\,,\,3} \right)\) es
$$\vec e = \overrightarrow {PQ} = \left( {1-\left( {-2} \right),3-1} \right) = \left( {3,2} \right)$$
Nuestro vector \(\vec e\) acaba de ser escrito en base a nuestro sistema de referencia. Hay infinitos vectores en el plano con el mismo módulo, dirección y sentido, pero sólo uno que se apoya en el origen \(O\) de nuestro sistema de referencia. Al conjunto de todos los vectores con el mismo módulo, dirección y sentido se le llama vector libre.
Con las consideraciones anteriores la ecuación vectorial de la recta que pasa por el punto \(A\) con la dirección de un vector \(\vec e\), \(\overrightarrow {OX} = \overrightarrow {OA} \, + \lambda \vec e\,,\,\,\lambda \in\mathbb{R} \), adquiere todo su sentido.

Si la ecuación vectorial la expresamos en coordenadas tenemos:
$$\left( {x,y} \right) = \left( {a,b} \right) + \lambda \left( {{e_1},{e_2}} \right) \Rightarrow \left( {x,y} \right) = \left( {a,b} \right) + \left( {\lambda {e_1},\lambda {e_2}} \right) \Rightarrow \left( {x,y} \right) = \left( {a + \lambda {e_1},b + \lambda {e_2}} \right)$$
Igualando coordenadas:
$$\left\{ \begin{array}{l} x = a + \lambda {e_1}\\ y = b + \lambda {e_2} \end{array} \right.$$
Las ecuaciones anteriores reciben el nombre de ecuaciones paramétricas de la recta. De éstas, si despejamos el parámetro \(\lambda\) en ambas e igualamos, obtenemos la ecuación continua de la recta:
$$\begin{cases} \lambda = \dfrac{x-a}{e_1} \\[0.2cm] \lambda = \dfrac{y-b}{e_2} \end{cases} \Rightarrow \frac{x-a}{e_1} = \frac{y-b}{e_2}$$
Si ahora eliminamos denominadores y pasamos todo al primer miembro tenemos:
$${e_2}x-{e_2}a = {e_1}y-{e_1}b \Rightarrow {e_2}x-{e_1}y + {e_1}b-{e_2}a = 0$$
Si llamamos \(A = {e_2}\), \(B = -{e_1}\) y \(C = {e_1}b-{e_2}a\) tenemos la ecuación general o implícita de la recta:
$$Ax+By+C=0$$
Obsérvese que un vector director de la recta es \(\left( {{e_1},{e_2}} \right) = \left( {-B,A} \right)\) y que haciendo \(x=0\) se obtiene \(y=-\dfrac{C}{B}\) (conocida como ordenada en el origen), con lo que un punto de la recta (el que corta al eje \(Y\)) es \(\left( {0,-\dfrac{C}{B}} \right)\).
Volviendo a nuestro primer ejemplo, en el que considerábamos la recta \(2x-y+3=0\), tenemos que un vector director suyo es \(\left( {-B,A} \right) = \left( {1,2} \right)\) y que un punto suyo es \(\left( {0,-\dfrac{C}{B}} \right) = \left( {0,3} \right)\). Así obtenemos la ecuación vectorial \(\left( {x,y} \right) = \lambda \left( {1,2} \right) + \left( {0,3} \right)\), ecuación que ya habíamos deducido en su momento.
Puedes ver y descargar el artículo en formato pdf aquí.