El álgebra es generosa; siempre da más de lo que pide
Consideremos un sistema de \(n\) ecuaciones lineales con \(n\) incógnitas como el siguiente:
$$\left\{\begin{array}{c}a_{11}x_1+a_{12}x_2+\ldots+a_{1n}x_n=b_1 \\ a_{21}x_1+a_{22}x_2+\ldots+a_{2n}x_n=b_2 \\………………………… \\ a_{n1}x_1+a_{n2}x_2+\ldots+a_{nn}x_n=b_n \end{array}\right.$$
La matriz de los coeficientes y la matriz ampliada del sistema son las siguientes:
$$A=\left(\begin{array}{cccc}a_{11} & a_{12} & \ldots & a_{1n} \\a_{21} & a_{22} & \ldots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\a_{n1} & a_{n2} & \ldots & a_{nn} \\ \end{array}\right)\quad;\quad A|b=\left(\begin{array}{cccc|c}a_{11} & a_{12} & \ldots &a_{1n} & b_1\\a_{21} & a_{22} & \ldots & a_{2n} & b_2\\ \vdots & \vdots & \ddots & \vdots & \vdots\\a_{n1} & a_{n2} & \ldots & a_{nn} & b_n\\ \end{array}\right)$$
Según el teorema de Rouché, si el rango de la matriz de los coeficientes es igual que el rango de la matriz ampliada el sistema es compatible. Si además, dicho rango coincide con el número de incógnitas, es decir, si \(r(A)=r(A|b)=n\), entonces el sistema es compatible determinado, o sea, que tiene solución única. La condición necesaria y suficiente para que se cumpla lo anterior es que el determinante de la matriz de los coeficientes sea distinto de cero, es decir:
$$|A|\neq0\Leftrightarrow r(A)=r(A|B)=n$$
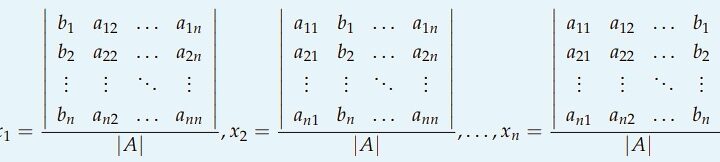
En este caso, la solución del sistema viene dada por según una serie de identidades que se conocen con el nombre de regla de Cramer:
$$x_1=\frac{\left|\begin{array}{cccc}b_1 & a_{12} & \ldots & a_{1n} \\b_2 & a_{22} & \ldots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\b_n & a_{n2} & \ldots & a_{nn} \end{array}\right|}{|A|} , x_2=\frac{\left|\begin{array}{cccc}a_{11} & b_1 & \ldots & a_{1n} \\ a_{21} & b_2 & \ldots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\a_{n1} & b_n & \ldots & a_{nn}\end{array}\right|}{|A|},\ldots,x_n=\frac{\left|\begin{array}{cccc}a_{11} & a_{12} & \ldots & b_1 \\a_{21} & a_{22} & \ldots & b_2 \\ \vdots & \vdots & \ddots & \vdots \\a_{n1} & a_{n2} & \ldots & b_n\end{array}\right|}{|A|}$$
Obsérvese que, en la práctica, para obtener la incógnita \(x_i\) se dividen los valores de dos determinantes. El del numerador es el mismo que el de la matriz de los coeficientes, con la salvedad de que la columna \(i\) se sustituye por la columna de los términos independientes. El denominador es el determinante de la matriz de los coeficientes en todos los casos.
Veamos algunos ejemplos de aplicación de la regla de Cramer.
Ejemplo 1
Consideremos el siguiente sistema de ecuaciones:
$$\begin{cases}8x-6y+2z=-1\\3x+y-z=10\\-x+3y-2z=5\end{cases}$$
El determinante de la matriz de los coeficientes es:
$$|A|=\left|\begin{array}{ccc}8 & -6 & 2 \\3 & 1 & -1\\-1 & 3 & -2\end{array}\right|=(-16-6+18)-(-2+36-24)=-4-10=-14$$
Como el determinante anterior es distinto de cero el sistema es compatible determinando (rango de la matriz de los coeficientes, igual al rango de la matriz ampliada, igual a tres, que es el número de incógnitas). Aplicando la regla de Cramer obtenemos las soluciones:
$$x=\frac{\left|\begin{array}{ccc}-1 & -6 & 2 \\10 & 1 & -1\\5 & 3 & -2\end{array}\right|}{-14}=\frac{(2+30+60)-(10+120+3)}{-14}=\frac{92-133}{-14}=\frac{-41}{-14}=\frac{41}{14}$$
$$y=\frac{\left|\begin{array}{ccc}8 & -1 & 2 \\3 & 10 & -1\\-1 & 5 & -2\end{array}\right|}{-14}=\frac{(-160-1+30)-(-20+6-40)}{-14}=\frac{-131+54}{-14}=\frac{-77}{-14}=\frac{11}{2}$$
$$z=\frac{\left|\begin{array}{ccc}8 & -6 & -1 \\3 & 1 & 10\\-1 & 3 & 5\end{array}\right|}{-14}=\frac{(40+60-9)-(1-90+240)}{-14}=\frac{91-151}{-14}=\frac{-60}{-14}=\frac{30}{7}$$
Ejemplo 2
La regla de Cramer también es útil cuando el sistema es compatible indeterminado. Consideremos el sistema siguiente:
$$\begin{cases}x+y+z+t=4\\x-y+z=1\\y-z+t=1\end{cases}$$
La matriz de los coeficientes es
$$A=\left(\begin{array}{cccc}1 & 1 & 1 & 1 \\1 & -1 & 1 & 0 \\0 & 1 & -1 & 1 \end{array}\right)$$
cuyo rango es 3 porque contienen un menor de orden tres distinto de cero:
$$\left|\begin{array}{ccc}1 & 1 & 1 \\1 & -1 & 1 \\0 & 1 & -1\end{array}\right|=(1+1)-(-1+1)=2-0=2$$
Por tanto, el rango de la matriz ampliada también es 3 (el menor anterior nos serviría para demostrarlo) y, como el número de incógnitas es 4, el sistema es compatible determinado. El grado de libertad del sistema es igual al número de incógnitas menos el rango, en este caso, es igual a 1. Si llamamos \(t=\lambda\) el sistema lo podemos reescribir así:
\begin{cases}x+y+z=4-\lambda\\x-y+z=1\\y-z=1-\lambda\end{cases}
El determinante hallado anteriormente es el determinante de la matriz de los coeficientes de este sistema, es decir, \(|A|=2\). Aplicando la regla de Cramer tenemos:
$$x=\frac{\left|\begin{array}{ccc}4-\lambda & 1 & 1 \\1 & -1 & 1\\1-\lambda & 1 & -1 \end{array}\right|}{2}=\frac{(4-\lambda+1-\lambda+1)-(-1+\lambda-1+4-\lambda)}{2}=\frac{4-2\lambda}{2}=2-\lambda$$
$$y=\frac{\left|\begin{array}{ccc}1 & 4-\lambda & 1 \\1 & 1 & 1\\0 & 1-\lambda & -1\end{array}\right|}{2}=\frac{(-1+1+\lambda)-(-4+\lambda+1-\lambda)}{2}=\frac{3-\lambda}{2}$$
$$z=\frac{\left|\begin{array}{ccc}1 & 1 & 4-\lambda \\1 & -1 & 1\\0 & 1 & 1-\lambda \end{array}\right|}{2}=\frac{(-1+\lambda+4-\lambda)-(1-\lambda+1)}{2}=\frac{1+\lambda}{2}$$
Por tanto, las soluciones son:
$$(x,y,z,t)=\left(2-\lambda,\frac{3-\lambda}{2},\frac{1+\lambda}{2},\lambda\right)$$
Soluciones que también podemos escribir del siguiente modo:
$$(x,y,z,t)=\left(2,\frac{3}{2},\frac{1}{2},0\right)+\lambda\left(-1,-\frac{1}{2},\frac{1}{2},1\right)$$
Desde el punto de vista geométrico, la igualdad anterior viene ser la ecuación vectorial de una recta en un espacio de dimensión cuatro. O sea, que el sistema de ecuaciones del cual hemos extraído las soluciones no es otra cosa que una recta en el hiperespacio.
Ejemplo 3
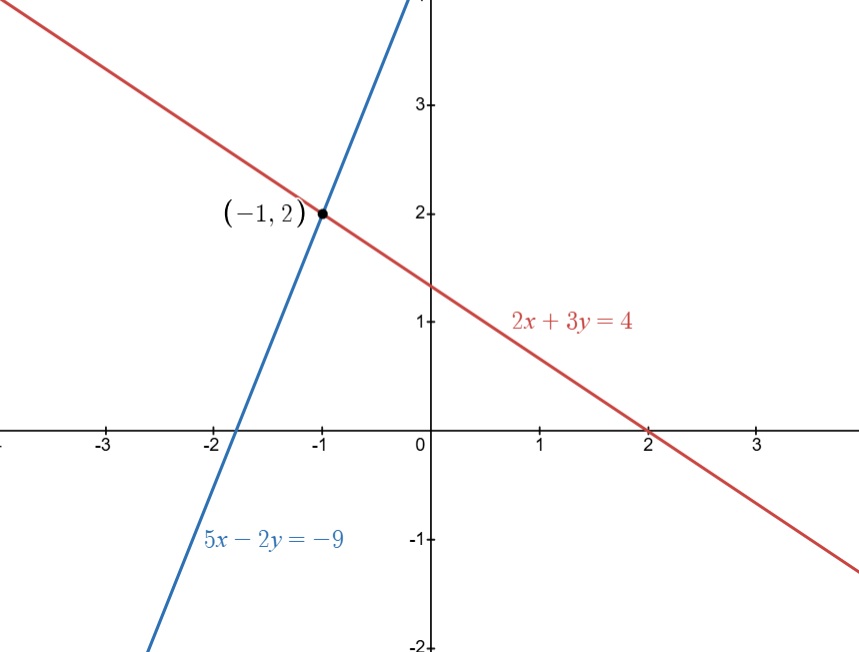
Usando la regla de Cramer también podemos hallar el punto de corte de dos rectas. Por ejemplo, sean las rectas
$$r\equiv\begin{cases}x+2y-z=1\\-x+y-3z=2\end{cases}\quad;\quad s\equiv\begin{cases}x+y=0\\3x+2y+z=a\end{cases}$$
Vamos a hallar el valor del parámetro \(a\) para el que ambas rectas son secantes y, para ese valor de \(a\), hallaremos el punto de corte. El sistema de ecuaciones formado por ambas rectas es
$$\begin{cases}x+2y-z=1\\-x+y-3z=2\\x+y=0\\3x+2y+z=a\end{cases}$$
La matriz de los coeficientes es
$$A=\left(\begin{array}{ccc}1 & 2 & -1 \\-1 & 1 & -3 \\1 & 1 & 0 \\3 & 2 & 1 \end{array}\right)$$
cuyo rango es 3 ya que contiene un menor de orden tres distinto de cero, por ejemplo
$$\left|\begin{array}{ccc}1 & 2 & -1 \\ -1 & 1 & -3 \\1 & 1 & 0\end{array}\right|=(-6+1)-(-1-3)=-5+4=-1\neq0$$
La matriz ampliada \(A|b\) es una matriz cuadrada de orden 4. Hallemos su determinante:
$$\left|\begin{array}{cccc}1 & 2 & -1 & 1 \\-1 & 1 & -3 & 2 \\1 & 1 & 0 & 0 \\3 & 2 & 1 & a\end{array}\right|=\left|\begin{array}{cccc}1 & 1 & -1 & 1 \\-1 & 2 & -3 & 2 \\1 & 0 & 0 & 0 \\3 & -1 & 1 & a\end{array}\right|=\left|\begin{array}{ccc}1 & -1 & 1 \\2 & -3 & 2 \\ -1 & 1 & a\end{array}\right|=\left|\begin{array}{ccc}1 & -1 & 1 \\0 & -1 & 0 \\0 & 0 & a+1 \end{array}\right|=-a-1$$
En el primer paso se ha restado a la segunda columna la primera. Luego se ha desarrollado por la tercera fila.
De lo anterior se deduce que si \(a\neq-1\), el determinante anterior es distinto de cero, o lo que es lo mismo, el rango de la matriz ampliada es \(4\). Y como el rango de la matriz de los coeficientes es \(3\), el sistema será incompatible. En este caso las rectas no serán secantes (serán paralelas o se cruzarán).
Sin embargo, si \(a=-1\), el determinante anterior es igual a cero, con lo que el rango de la matriz ampliada y el de la matriz de los coeficientes es tres, igual que el número de incógnitas. Se trata pues de un sistema compatible determinado (solución única). Es decir, ambas rectas se cortan en un punto. Para hallar el punto de corte resolvemos el sistema. Como el rango es tres, podemos eliminar una de las ecuaciones y usar la regla de Cramer. Es decir, resolveremos el sistema siguiente:
$$\begin{cases}x+2y-z=1\\-x+y-3z=2\\x+y=0\\ \end{cases}$$
Ya hemos visto que el determinante de la matriz de los coeficientes es igual a \(-1\). Por tanto, por la regla de Cramer:
$$x=\frac{\left|\begin{array}{ccc}1 & 2 & -1 \\2 & 1 & -3 \\0 & 1 & 0\end{array}\right|}{-1}=\frac{(-2)-(-3)}{-1}=\frac{1}{-1}=-1$$
$$y=\frac{\left|\begin{array}{ccc}1 & 1 & -1 \\-1 & 2 & -3 \\1 & 0 & 0\end{array}\right|}{-1}=\frac{(-3)-(-2)}{-1}=\frac{-1}{-1}=1$$
$$z=\frac{\left|\begin{array}{ccc}1 & 2 & 1 \\-1 & 1 & 2 \\1 & 1 & 0\end{array}\right|}{-1}=\frac{(4-1)-(1+2)}{-1}=\frac{0}{-1}=0$$
Resumiendo, si \(a=1\), las rectas son secantes y el punto de corte de las rectas \(r\) y \(s\) es el punto \((-1,1,0)\).
Puedes ver y descargar el artículo en formato pdf aquí.